RomiBot Update
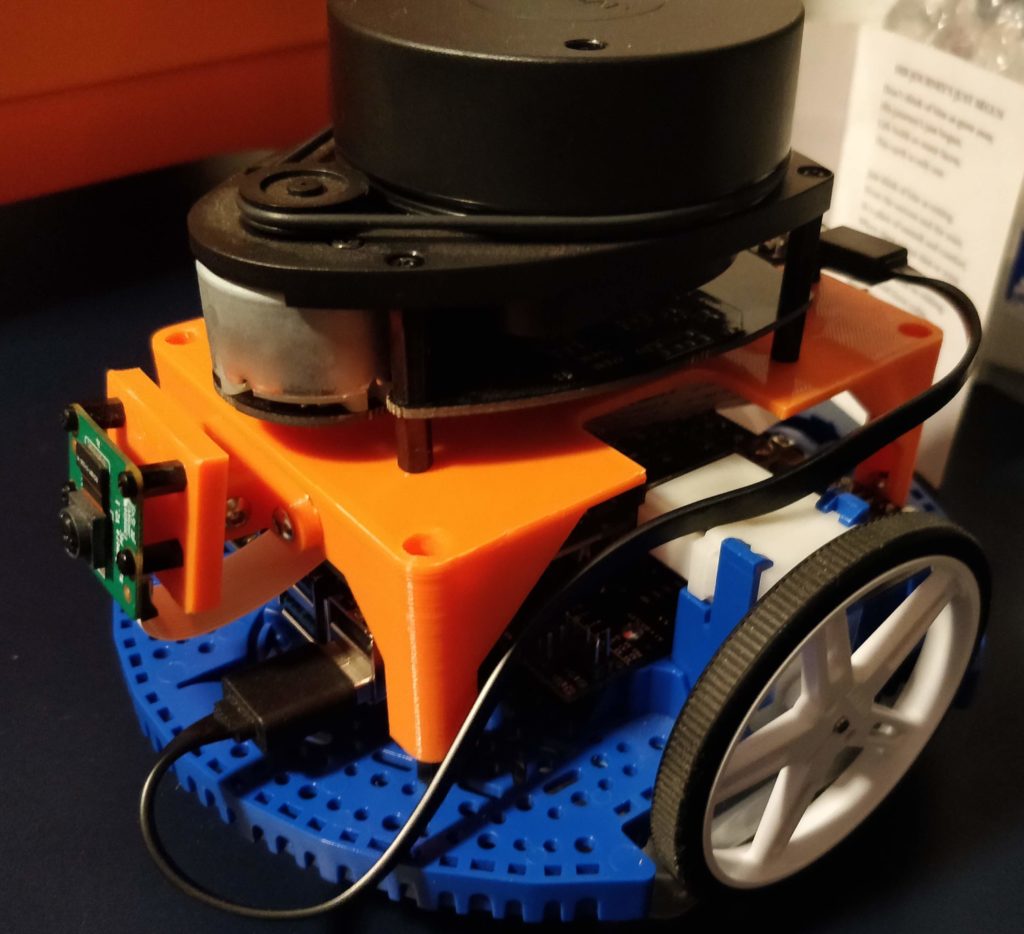
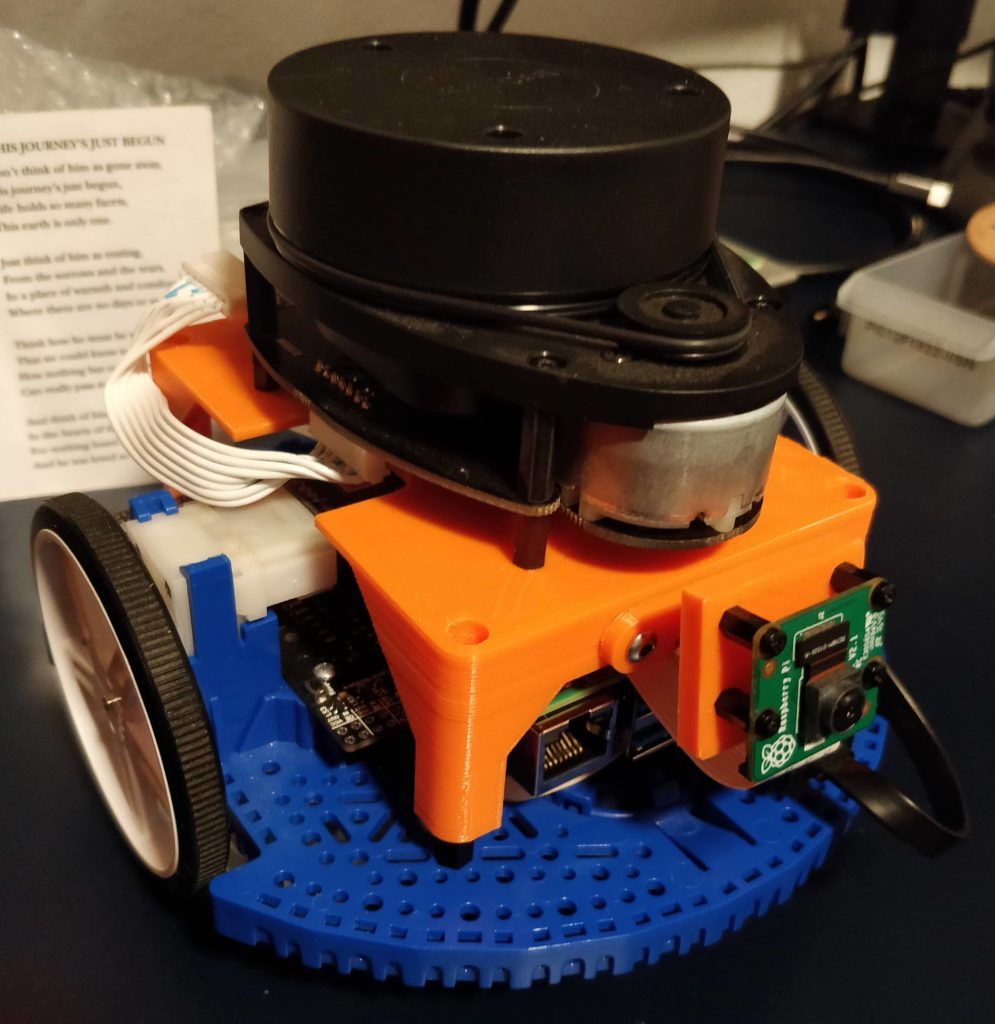
I recently moved to a new house, which is great in many ways, but unfortunately, the floor is tile, which is much more uneven than the laminate that I used to have. This means that the Romi robot occasionally gets stuck over a crack or uneven tile due to the size and design of the chassis (4 points of contact mean that it is possible that one of the drive wheels is no longer in contact, and hence the bot can’t move).
Since the last post, I upgraded the Lidar shelf to a fully 3D printed part and upgraded to a Raspberry Pi 4, though I never really took advantage of the power it had. For now, I am going to cannibalize the Raspberry Pi, Camera, and Lidar, though I may upgrade GeMaB later and bring these parts back to the Romi for some parallel development or other fun use.
GeMaB Architecture
I’ve done more development on what I want the overall Architecture for GeMaB to look like. For now, the main brain will be an Atomic Pi. In the future, I may replace this, but since I plan on adding an ethernet switch and modular power, I could simply augment it with something like a Jetson. I’m planning on using a Ryobi 18v battery to power it for now with a Teensy as the motor controller.
More to come with assembly pictures.